Poster Session 1 · Wednesday, December 3, 2025 11:00 AM → 2:00 PM
#2314
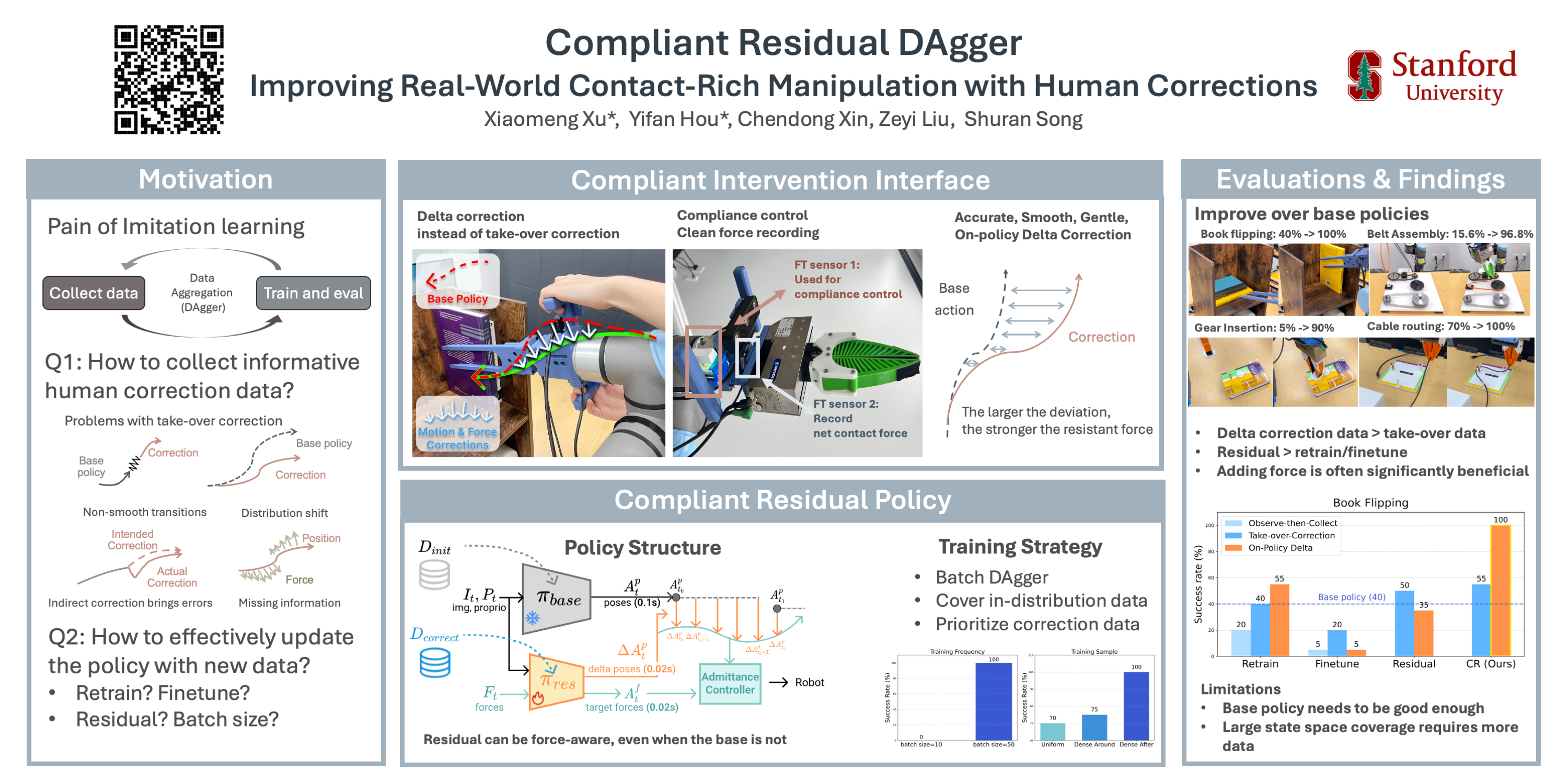
Compliant Residual DAgger: Improving Real-World Contact-Rich Manipulation with Human Corrections
Abstract
We address key challenges in Dataset Aggregation (DAgger) for real-world contact-rich manipulation: how to collect informative human correction data and how toeffectively update policies with this new data.
We introduce Compliant ResidualDAgger (CR-DAgger), which contains two novel components:
- a CompliantIntervention Interface that leverages compliance control, allowing humans to pro-vide gentle, accurate delta action corrections without interrupting the ongoingrobot policy execution; and
- a Compliant Residual Policy formulation that learnsfrom human corrections while incorporating force feedback and force control.
Our system significantly enhances performance on precise contact-rich manipu-lation tasks using minimal correction data, improving base policy success ratesby over 60% on two challenging tasks (book flipping and belt assembly) while outperforming both retraining-from-scratch and finetuning approaches.
Throughextensive real-world experiments, we provide practical guidance for implementingeffective DAgger in real-world robot learning tasks.