Poster Session 4 · Thursday, December 4, 2025 4:30 PM → 7:30 PM
#311
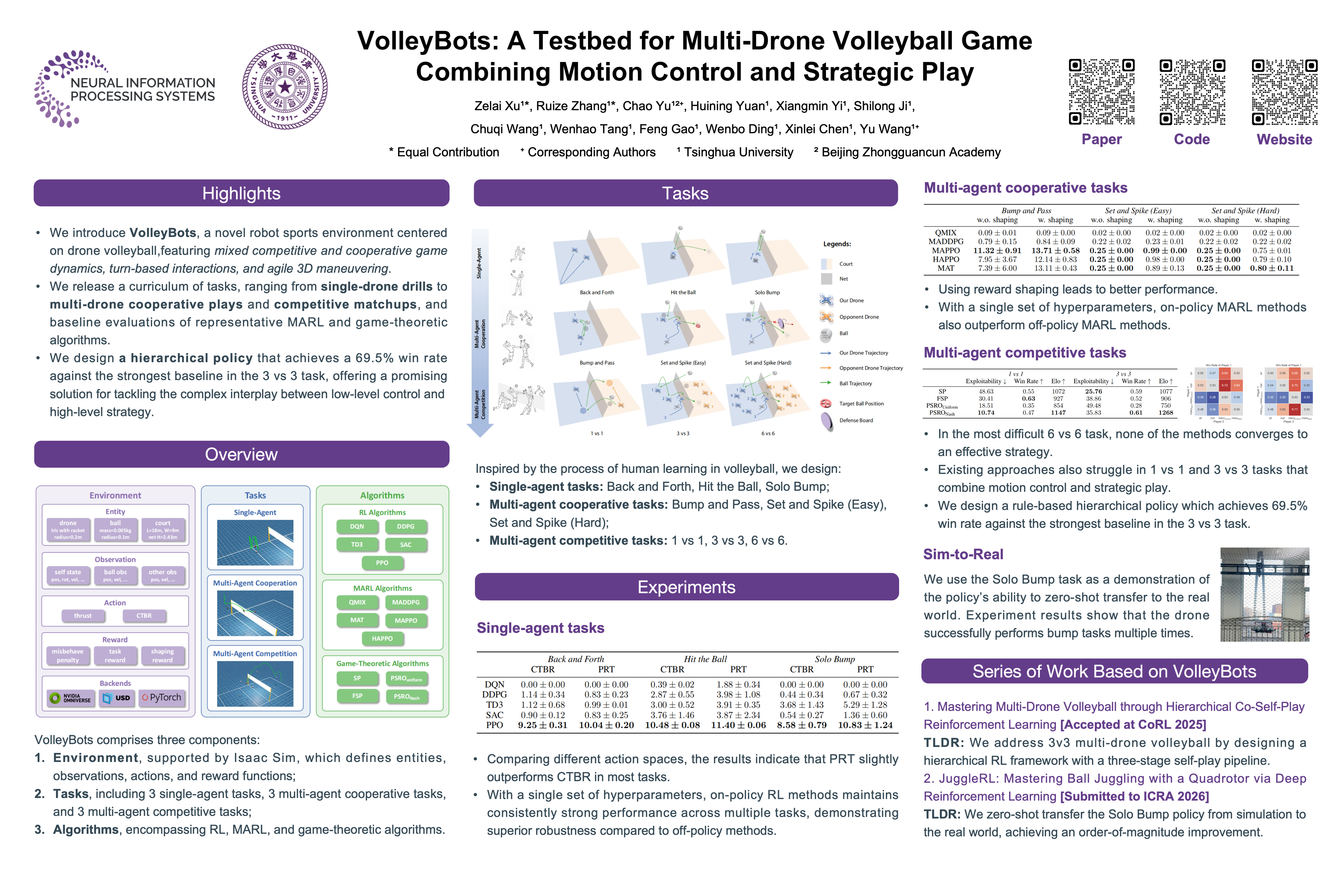
VolleyBots: A Testbed for Multi-Drone Volleyball Game Combining Motion Control and Strategic Play
Abstract
Robot sports, characterized by well-defined objectives, explicit rules, and dynamic interactions, present ideal scenarios for demonstrating embodied intelligence. In this paper, we present VolleyBots, a novel robot sports testbed where multiple drones cooperate and compete in the sport of volleyball under physical dynamics. VolleyBots integrates three features within a unified platform: competitive and cooperative gameplay, turn-based interaction structure, and agile 3D maneuvering.
These intertwined features yield a complex problem combining motion control and strategic play, with no available expert demonstrations.
We provide a comprehensive suite of tasks ranging from single-drone drills to multi-drone cooperative and competitive tasks, accompanied by baseline evaluations of representative reinforcement learning (RL), multi-agent reinforcement learning (MARL) and game-theoretic algorithms. Simulation results show that on-policy RL methods outperform off-policy methods in single-agent tasks, but both approaches struggle in complex tasks that combine motion control and strategic play.
We additionally design a hierarchical policy which achieves 69.5% win rate against the strongest baseline in the 3 vs 3 task, demonstrating its potential for tackling the complex interplay between low-level control and high-level strategy. To highlight VolleyBots’ sim-to-real potential, we further demonstrate the zero-shot deployment of a policy trained entirely in simulation on real-world drones.