Poster Session 3 · Thursday, December 4, 2025 11:00 AM → 2:00 PM
#5004
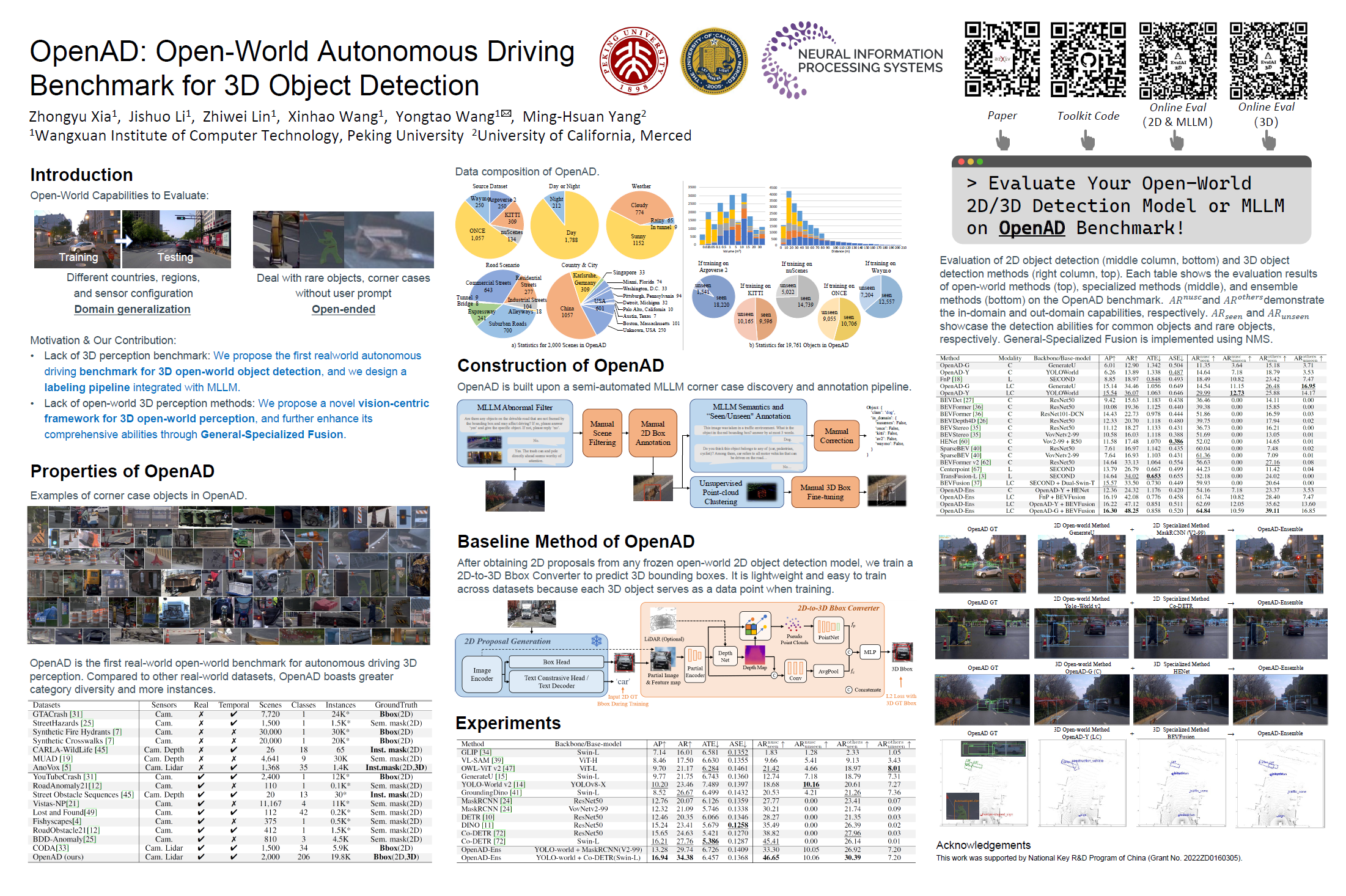
OpenAD: Open-World Autonomous Driving Benchmark for 3D Object Detection
Abstract
Open-world perception aims to develop a model adaptable to novel domains and various sensor configurations and can understand uncommon objects and corner cases. However, current research lacks sufficiently comprehensive open-world 3D perception benchmarks and robust generalizable methodologies.
This paper introduces OpenAD, the first real open-world autonomous driving benchmark for 3D object detection. OpenAD is built upon a corner case discovery and annotation pipeline that integrates with a multimodal large language model (MLLM). The proposed pipeline annotates corner case objects in a unified format for five autonomous driving perception datasets with 2000 scenarios.
In addition, we devise evaluation methodologies and evaluate various open-world and specialized 2D and 3D models. Moreover, we propose a vision-centric 3D open-world object detection baseline and further introduce an ensemble method by fusing general and specialized models to address the issue of lower precision in existing open-world methods for the OpenAD benchmark.
We host an online challenge on EvalAI. Data, toolkit codes, and evaluation codes are available at https://github.com/VDIGPKU/OpenAD.