Poster Session 4 · Thursday, December 4, 2025 4:30 PM → 7:30 PM
#4612
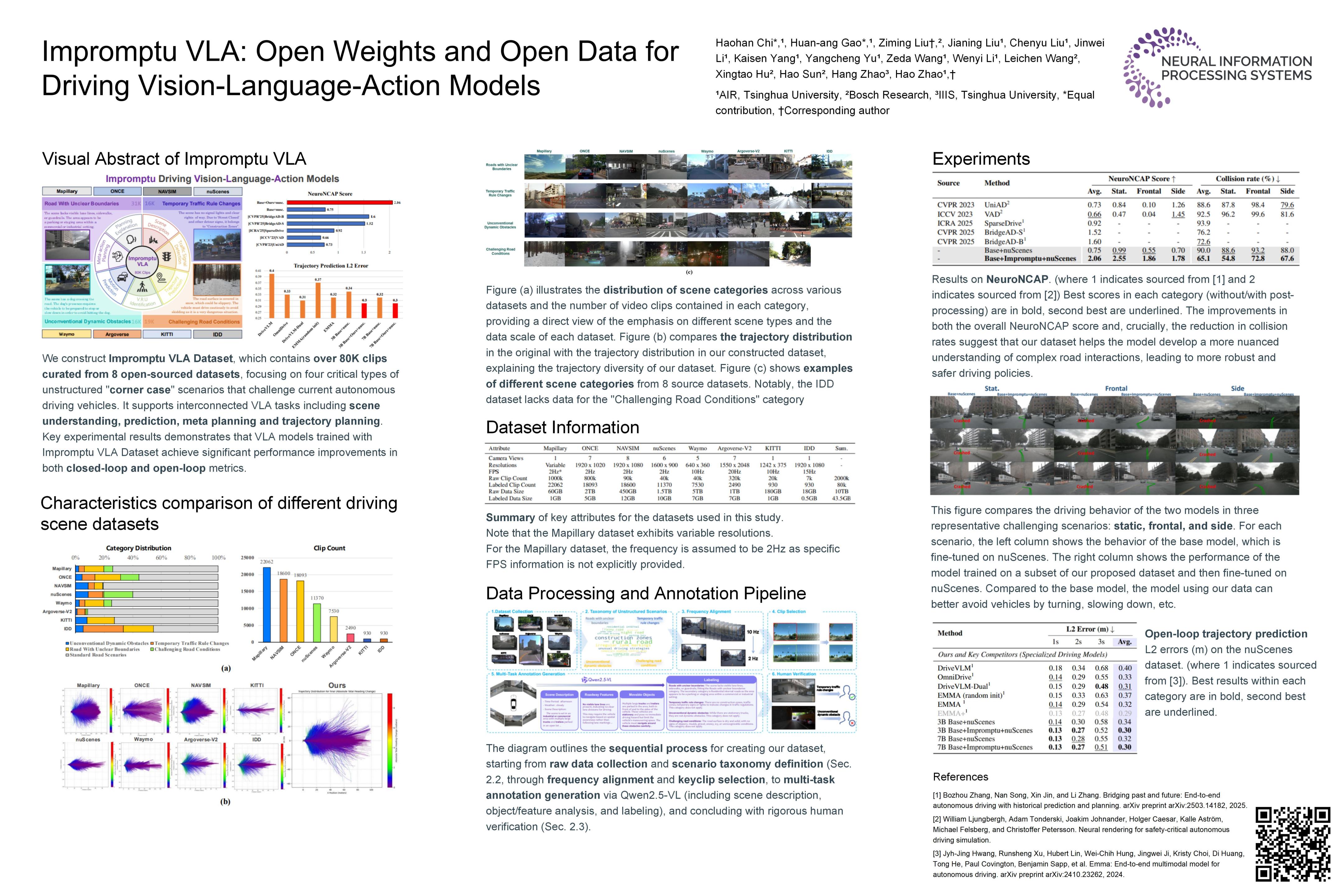
Impromptu VLA: Open Weights and Open Data for Driving Vision-Language-Action Models
Abstract
Vision-Language-Action (VLA) models for autonomous driving show promise but falter in unstructured corner case scenarios, largely due to a scarcity of targeted benchmarks. To address this, we introduce Impromptu VLA.
Our core contribution is the Impromptu VLA Dataset: over 80,000 meticulously curated video clips, distilled from over 2M source clips sourced from 8 open-source large-scale datasets. This dataset is built upon our novel taxonomy of four challenging unstructured categories and features rich, planning-oriented question-answering annotations and action trajectories.
Crucially, experiments demonstrate that VLAs trained with our dataset achieve substantial performance gains on established benchmarks—improving closed-loop NeuroNCAP scores and collision rates, and reaching near state-of-the-art L2 accuracy in open-loop nuScenes trajectory prediction. Furthermore, our Q&A suite serves as an effective diagnostic, revealing clear VLM improvements in perception, prediction, and planning. Our code, data and models are available at https://github.com/ahydchh/Impromptu-VLA