Poster Session 4 · Thursday, December 4, 2025 4:30 PM → 7:30 PM
#5209
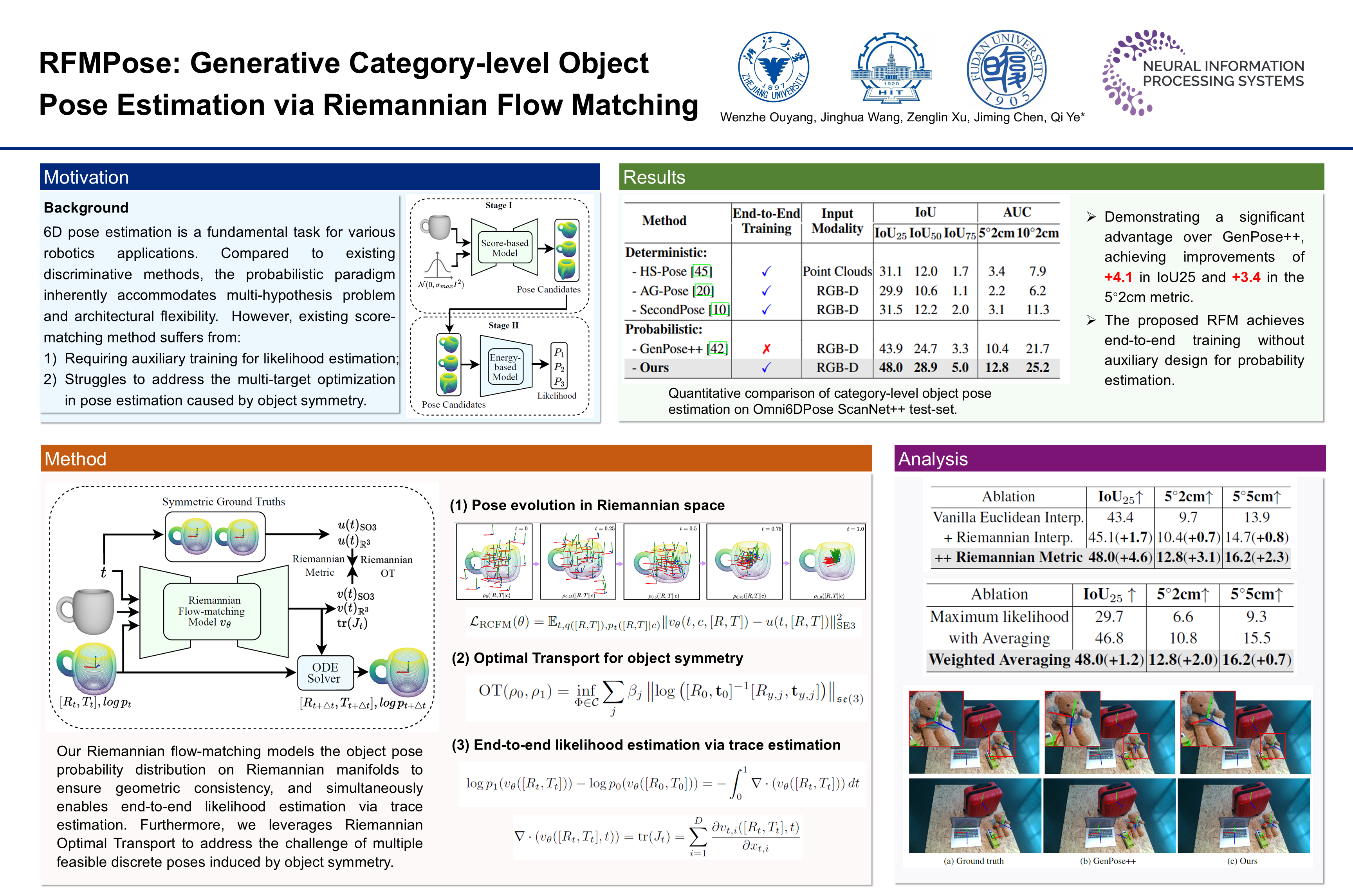
RFMPose: Generative Category-level Object Pose Estimation via Riemannian Flow Matching
Abstract
We introduce RFMPose, a novel generative framework for category-level 6D object pose estimation that learns deterministic pose trajectories through Riemannian Flow Matching (RFM). Existing discriminative approaches struggle with multi-hypothesis predictions (e.g., symmetry ambiguities) and often require specialized network architectures.
RFMPose advances this paradigm through three key innovations:
- Ensuring geometric consistency via geodesic interpolation on Riemannian manifolds combined with bi-invariant metric constraints;
- Alleviating symmetry-induced ambiguities through Riemannian Optimal Transport for probability mass redistribution without ad-hoc design;
- Enabling end-to-end likelihood estimation through Hutchinson trace approximation, thereby eliminating auxiliary model dependencies.
Extensive experiments on the Omni6DPose demonstrate state-of-the-art performance of the proposed method, with significant improvements of in and in metrics compared to prior generative approaches.
Furthermore, the proposed RFM framework exhibits robust sim-to-real transfer capabilities and facilitates pose tracking extensions with minimal architectural adaptation.