Poster Session 4 · Thursday, December 4, 2025 4:30 PM → 7:30 PM
#4519 Spotlight
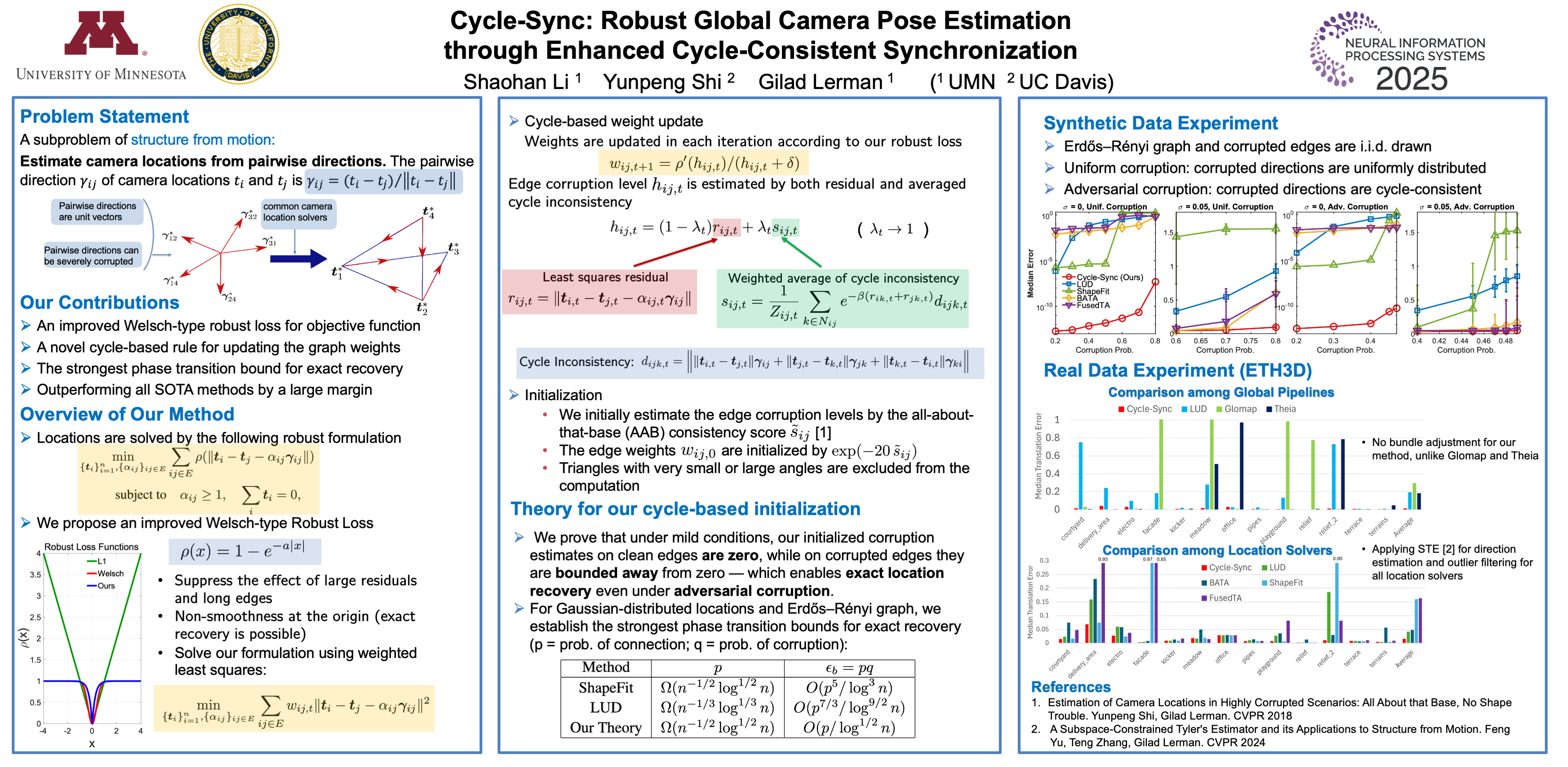
Cycle-Sync: Robust Global Camera Pose Estimation through Enhanced Cycle-Consistent Synchronization
Abstract
We introduce Cycle-Sync, a robust and global framework for estimating camera poses (both rotations and locations). Our core innovation is a location solver that adapts message-passing least squares (MPLS) - originally developed for group synchronization - to the camera localization setting.
We modify MPLS to emphasize cycle-consistent information, redefine cycle consistencies using estimated distances from previous iterations, and incorporate a Welsch-type robust loss. We establish the strongest known deterministic exact-recovery guarantee for camera location estimation, demonstrating that cycle consistency alone enables the lowest sample complexity to date.
To further boost robustness, we introduce a plug-and-play outlier rejection module inspired by robust subspace recovery, and we fully integrate cycle consistency into MPLS for rotation averaging. Our global approach avoids the need for bundle adjustment.
Experiments on synthetic and real datasets show that Cycle-Sync consistently outperforms leading pose estimators, including full structure-from-motion pipelines with bundle adjustment.