Poster Session 2 · Wednesday, December 3, 2025 4:30 PM → 7:30 PM
#2212
FreqPolicy: Efficient Flow-based Visuomotor Policy via Frequency Consistency
Abstract
Generative modeling-based visuomotor policies have been widely adopted in robotic manipulation, attributed to their ability to model multimodal action distributions. However, the high inference cost of multi-step sampling limits its applicability in real-time robotic systems.
Existing approaches accelerate sampling in generative modeling-based visuomotor policies by adapting techniques originally developed to speed up image generation. However, a major distinction exists: image generation typically produces independent samples without temporal dependencies, while robotic manipulation requires generating action trajectories with continuity and temporal coherence.
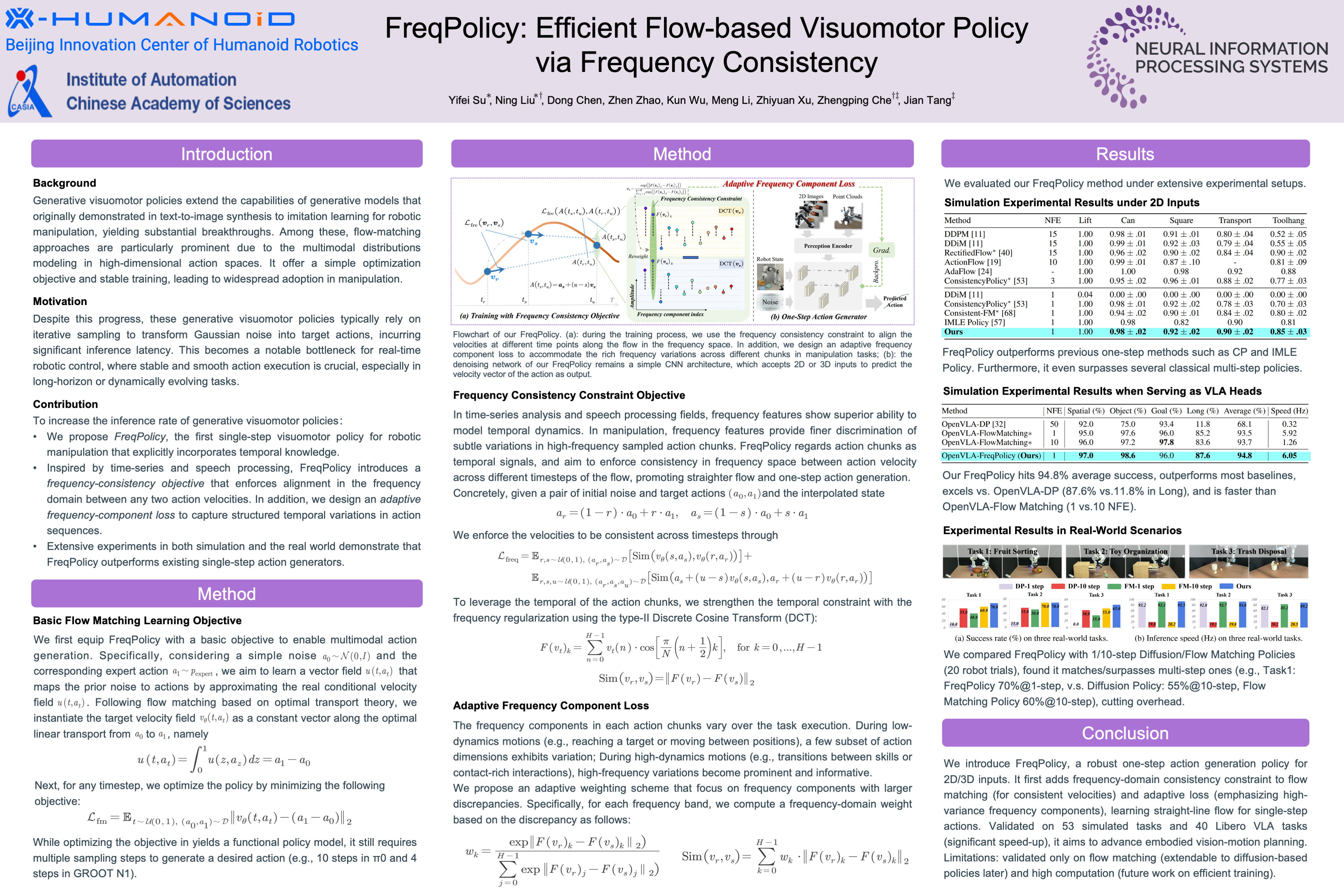
To this end, we propose FreqPolicy, a novel approach that first imposes frequency consistency constraints on flow-based visuomotor policies. Our work enables the action model to capture temporal structure effectively while supporting efficient, high-quality one-step action generation.
Concretely, we introduce a frequency consistency constraint objective that enforces alignment of frequency-domain action features across different timesteps along the flow, thereby promoting convergence of one-step action generation toward the target distribution. In addition, we design an adaptive consistency loss to capture structural temporal variations inherent in robotic manipulation tasks.
We assess FreqPolicy on tasks across simulation benchmarks, proving its superiority over existing one-step action generators. We further integrate FreqPolicy into the vision-language-action (VLA) model and achieve acceleration without performance degradation on tasks of Libero. Besides, we show efficiency and effectiveness in real-world robotic scenarios with an inference frequency of Hz.