Poster Session 2 · Wednesday, December 3, 2025 4:30 PM → 7:30 PM
#2315
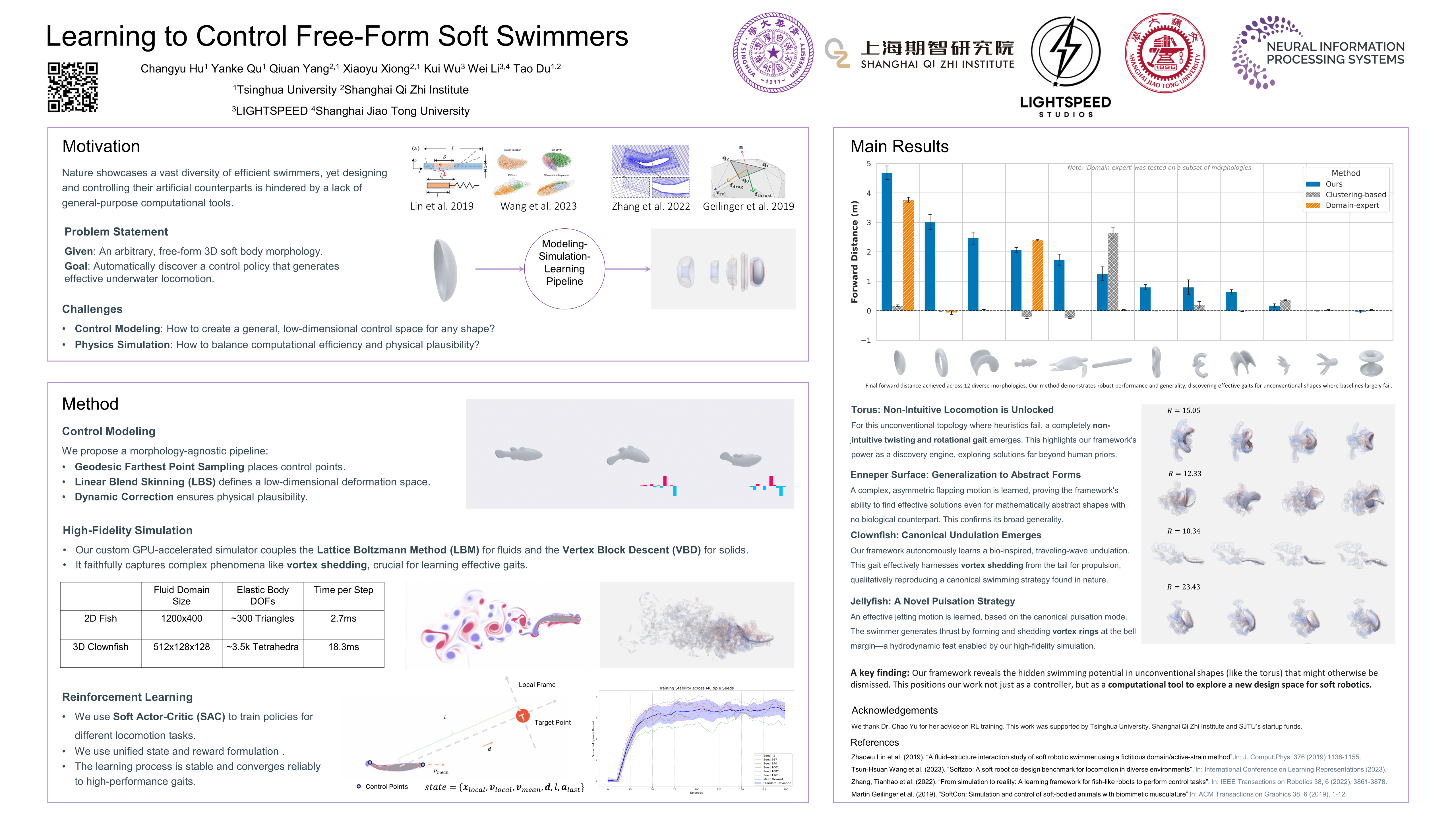
Learning to Control Free-Form Soft Swimmers
Abstract
Swimming in nature achieves remarkable performance through diverse morphological adaptations and intricate solid-fluid interaction, yet exploring this capability in artificial soft swimmers remains challenging due to the high-dimensional control complexity and the computational cost of resolving hydrodynamic details. Traditional approaches often rely on morphology-dependent heuristics and simplified fluid models, which constrain exploration and preclude advanced strategies like vortex exploitation.
To address this, we propose an automated framework that combines a unified, reduced-mode control space with a high-fidelity GPU-accelerated simulator. Our control space naturally captures deformation patterns for diverse morphologies, minimizing manual design, while our simulator efficiently resolves the crucial fluid-structure interactions required for learning.
We evaluate our method on a wide range of morphologies, from bio-inspired to unconventional. From this general framework, high-performance swimming patterns emerge that qualitatively reproduce canonical gaits observed in nature without requiring domain-specific priors, where state-of-the-art baselines often fail, particularly on complex topologies like a torus.
Our work lays a foundation for future opportunities in automated co-design of soft robots in complex hydrodynamic environments. The code is available at https://github.com/changyu-hu/FreeFlow.