Poster Session 1 · Wednesday, December 3, 2025 11:00 AM → 2:00 PM
#3315
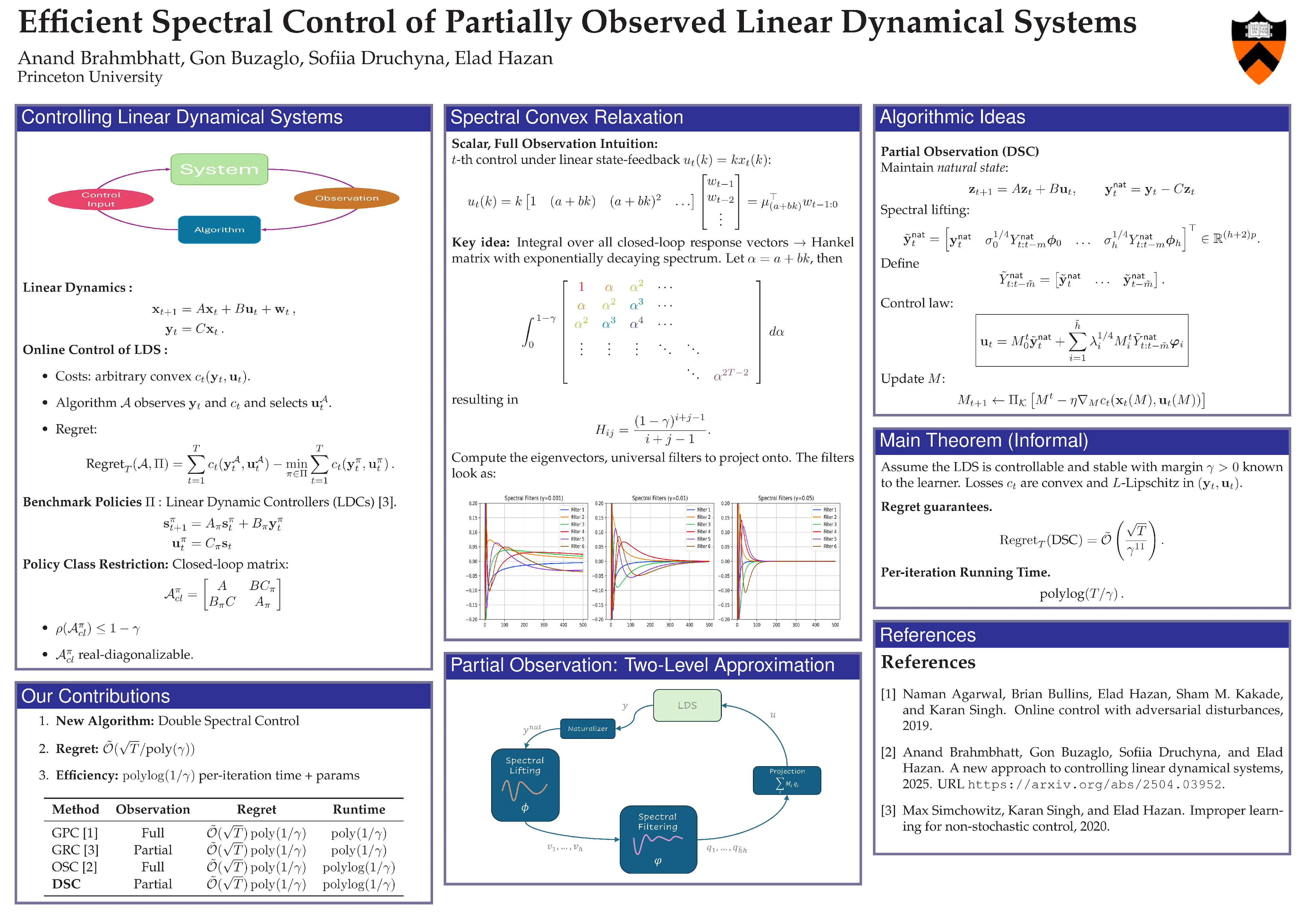
Efficient Spectral Control of Partially Observed Linear Dynamical Systems
Abstract
We propose a new method for the problem of controlling linear dynamical systems under partial observation and adversarial disturbances.
Our new algorithm, Double Spectral Control (DSC), matches the best known regret guarantees while exponentially improving runtime complexity over previous approaches in its dependence on the system's stability margin.
Our key innovation is a two-level spectral approximation strategy, leveraging double convolution with a universal basis of spectral filters, enabling efficient and accurate learning of the best linear dynamical controllers.