Poster Session 2 · Wednesday, December 3, 2025 4:30 PM → 7:30 PM
#4804
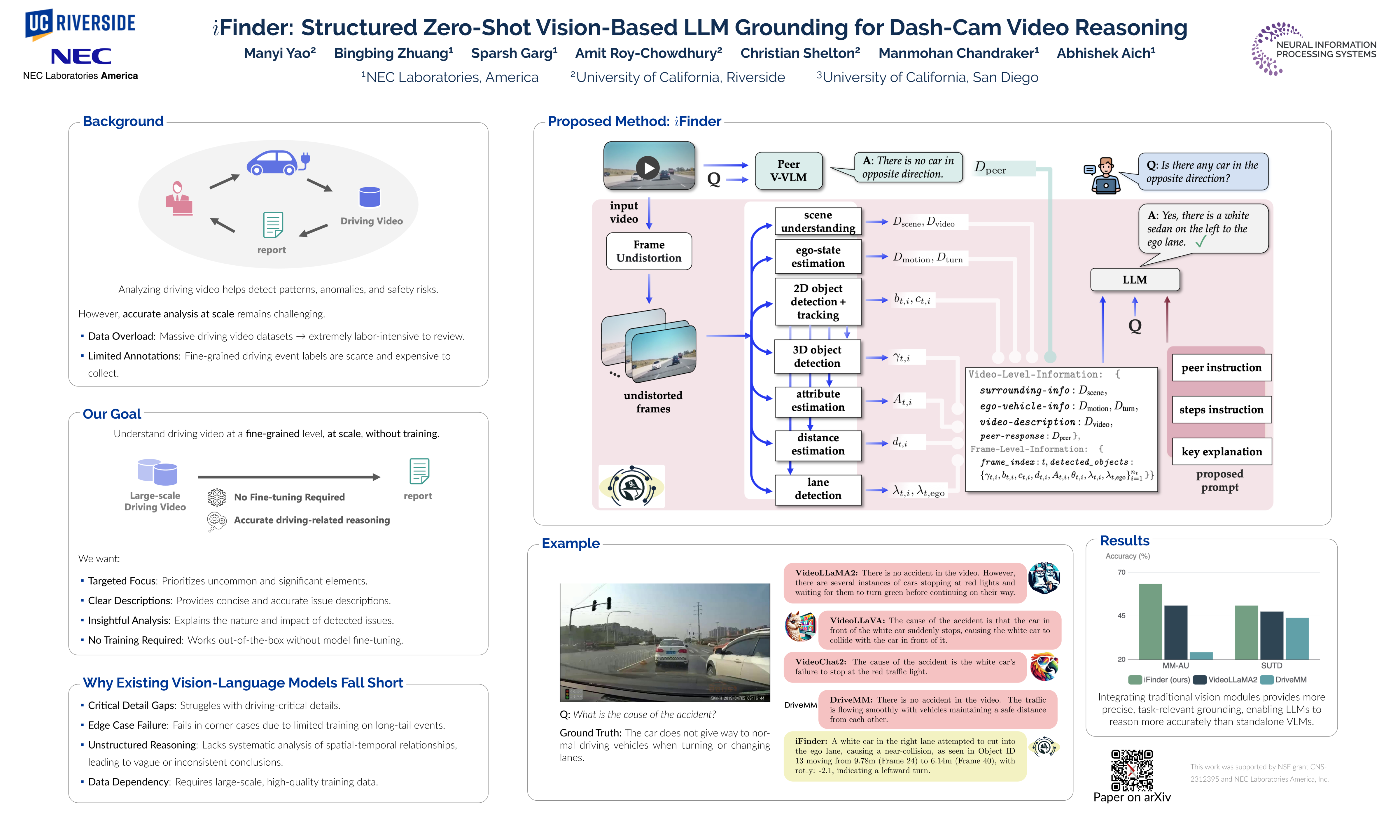
iFinder: Structured Zero-Shot Vision-Based LLM Grounding for Dash-Cam Video Reasoning
Abstract
Grounding large language models (LLMs) in domain-specific tasks like post-hoc dash-cam driving video analysis is challenging due to their general-purpose training and lack of structured inductive biases. As vision is often the sole modality available for such analysis (i.e., no LiDAR, GPS, etc.), existing video-based vision-language models (V-VLMs) struggle with spatial reasoning, causal inference, and explainability of events in the input video.
To this end, we introduce iFinder, a structured semantic grounding framework that decouples perception from reasoning by translating dash-cam videos into a hierarchical, interpretable data structure for LLMs. iFinder operates as a modular, training-free pipeline that employs pretrained vision models to extract critical cues—object pose, lane positions, and object trajectories—which are hierarchically organized into frame- and video-level structures. Combined with a three-block prompting strategy, it enables step-wise, grounded reasoning for the LLM to refine a peer V-VLM's outputs and provide accurate reasoning.
Evaluations on four public dash-cam video benchmarks show that iFinder's proposed grounding with domain-specific cues—especially object orientation and global context—significantly outperforms end-to-end V-VLMs on four zero-shot driving benchmarks, with up to 39% gains in accident reasoning accuracy. By grounding LLMs with driving domain-specific representations, iFinder offers a zero-shot, interpretable, and reliable alternative to end-to-end V-VLMs for post-hoc driving video understanding.