Poster Session 4 · Thursday, December 4, 2025 4:30 PM → 7:30 PM
#4502
Eve3D: Elevating Vision Models for Enhanced 3D Surface Reconstruction via Gaussian Splatting
Jiawei Zhang, Youmin Zhang, Fabio Tosi, Meiying Gu, Jiahe Li, Xiaohan Yu, Jin Zheng, Xiao Bai, Matteo Poggi
Abstract
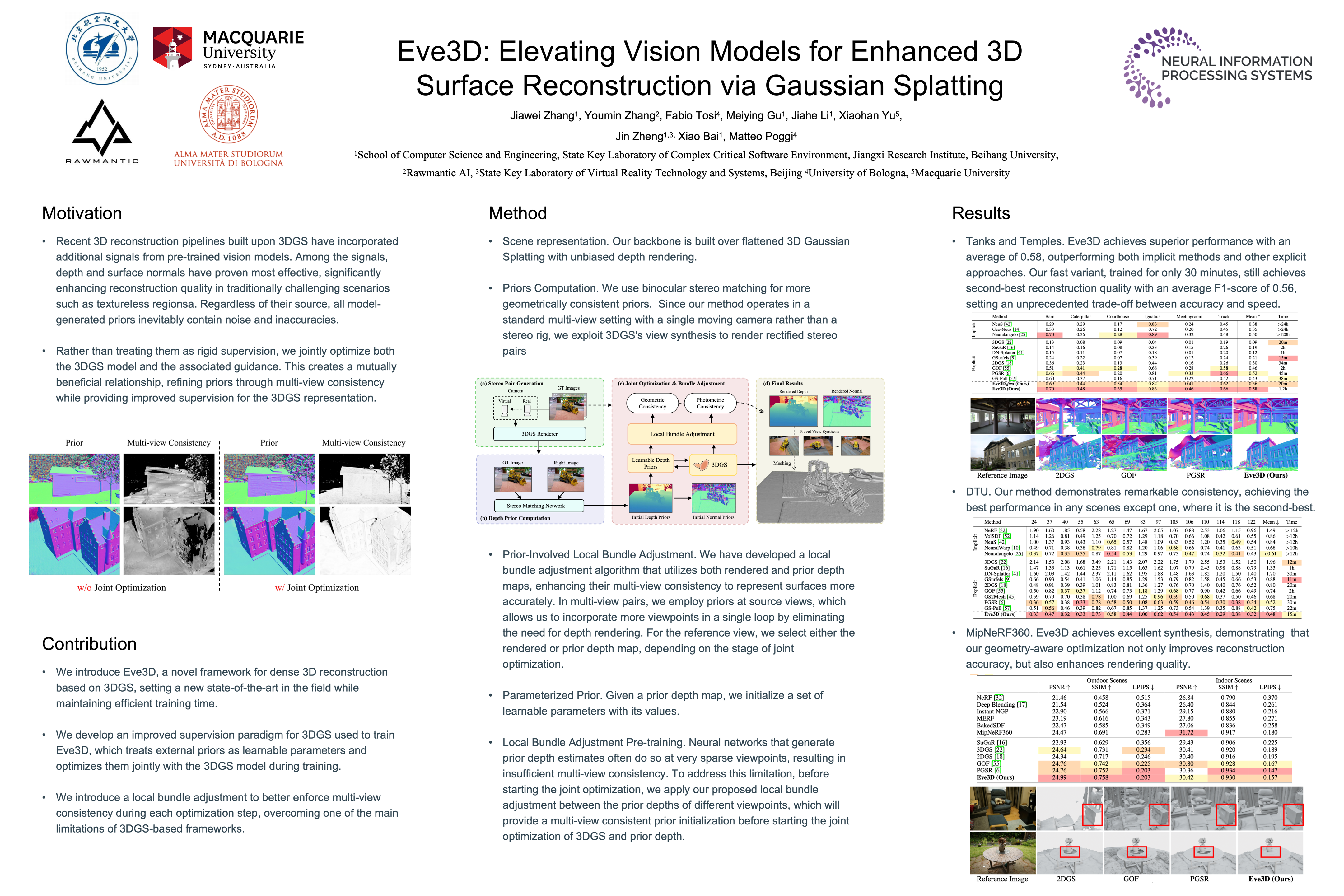
We present Eve3D, a novel framework for dense 3D reconstruction based on 3DGaussian Splatting (3DGS). While most existing methods rely on imperfect priorsderived from pre-trained vision models, Eve3D fully leverages these priors byjointly optimizing both them and the 3DGS backbone.
This joint optimizationcreates a mutually reinforcing cycle: the priors enhance the quality of 3DGS, whichin turn refines the priors, further improving the reconstruction.
Additionally, Eve3Dintroduces a novel optimization step based on bundle adjustment, overcoming thelimitations of the highly local supervision in standard 3DGS pipelines.
Eve3Dachieves state-of-the-art results in surface reconstruction and novel view synthesison the Tanks & Temples, DTU, and Mip-NeRF360 datasets. while retaining fastconvergence, highlighting an unprecedented trade-off between accuracy and speed.