MGF: Mixed Gaussian Flow for Diverse Trajectory Prediction
Abstract
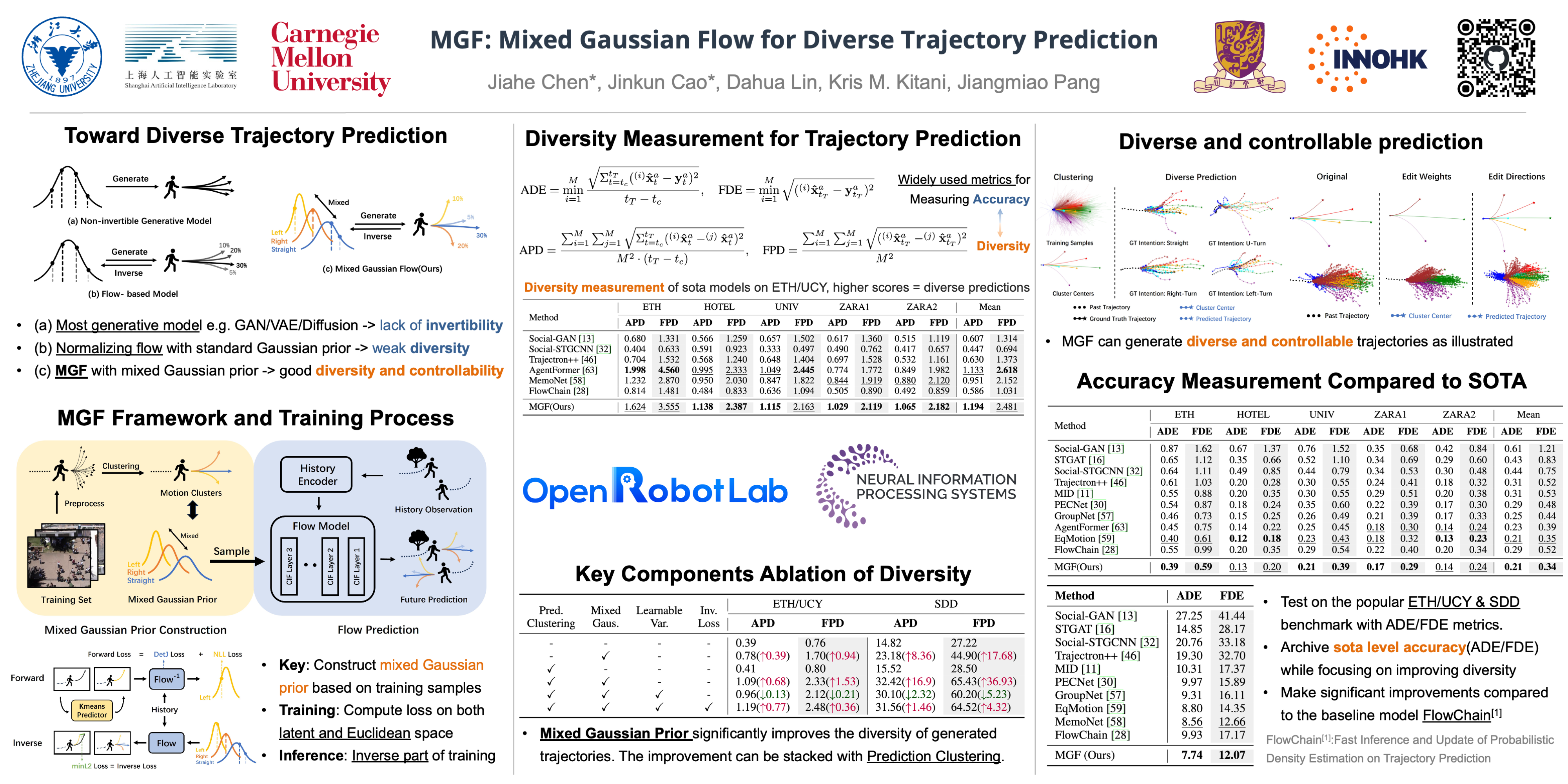
To predict future trajectories, the normalizing flow with a standard Gaussian prior suffers from weak diversity. The ineffectiveness comes from the conflict between the fact of asymmetric and multi-modal distribution of likely outcomes and symmetric and single-modal original distribution and supervision losses.Instead, we propose constructing a mixed Gaussian prior for a normalizing flow model for trajectory prediction.The prior is constructed by analyzing the trajectory patterns in the training samples without requiring extra annotations while showing better expressiveness and being multi-modal and asymmetric.Besides diversity, it also provides better controllability for probabilistic trajectory generation.We name our method Mixed Gaussian Flow (MGF). It achieves state-of-the-art performance in the evaluation of both trajectory alignment and diversity on the popular UCY/ETH and SDD datasets. Code is available at https://github.com/mulplue/MGF.